众所周知,永磁体提供的磁极磁场在电机旋转过程中固定不变的,这就是要求每个时刻定子绕组产生的电枢磁场必须与转子的磁极磁场相对应,即绕组的电流方向、导通与关断受转子位置的控制。因此,无刷直流电机必须有转子位置信号输出给电机的控制电路,电机的控制电路根据转子位置信号来控制相应的功率开关管的导通与关断,从而控制相应绕组的电流方向、导通与关断。定子绕组若按一定的通电顺序进行切换,就可以形成一个与转子位置对应的旋转磁场,使电机按要求的旋转方向旋转。相对磁钢的某一磁极而言,每个时刻与它对应的电枢磁场是固定的,即绕组的电流方向是固定的,这与有刷直流电机类似。
无刷直流电机运行原理图,绕组为三相星形接法,120度均布,采用三相半桥驱动方式,转子为一对极。在图示位置,磁钢的磁极中心线与A相绕组对齐,此时的控制电路根据转子位置检测信号,使S1开关管触发导通,B相绕组通电,在B相绕组磁场的作用下,转子将顺时针旋转120独门,到达虚线转子所示的位置,磁钢的磁极中心线与B相绕组对齐,此时,控制电路根据转子位置检测信号,使S1开关管关断,使S3开关管导通,A相绕组通电,转子在A相绕组磁场的作用下,转子将顺时针旋转120度,按上述通电顺序循环导通,转子就顺时针旋转下去。无刷直流电机采集转子位置信号,前者,电机结构简单,但电机起动困难;后者,电机结构稍复杂,但起动平稳、可靠,目前大部分的无刷直流电机均采用后者。位置传感器的种类很多,空调用的无刷直流电机一般采用霍尔元件作为位置传感器。
电动机的定子绕组多做成三相对称星形接法,同三相异步电动机十分相似。电动机的转子上粘有已充磁的永磁体,为了检测电动机转子的极性,在电动机内装有位置传感器。驱动器由功率电子器件和集成电路等构成,其功能是:接受电动机的启动、停止、制动信号,以控制电动机的启动、停止和制动;接受位置传感器信号和正反转信号,用来控制逆变桥各功率管的通断,产生连续转矩;接受速度指令和速度反馈信号,用来控制和调整转速;提供保护和显示等等。 由于无刷直流电动机是以自控式运行的,所以不会象变频调速下重载启动的同步电机那样在转子上另加启动绕组,也不会在负载突变时产生振荡和失步。
霍耳信号传递给控制器,控制器通过电机相线(粗线,不是霍耳线)给电机线圈供电,电机旋转,磁钢与线圈(准确的说是缠在定子上的线圈,其实霍耳一般安装在定子上)发生转动,霍耳感应出新的位置信号,控制器粗线又给电机线圈重新改变电流方向供电,电机继续旋转(线圈和磁钢的位置发生变化时,线圈必须对应的改变电流方向,这样电机才能继续向一个方向运动,不然电机就会在某一个位置左右摆动,而不是连续旋转),这就是电子换相。
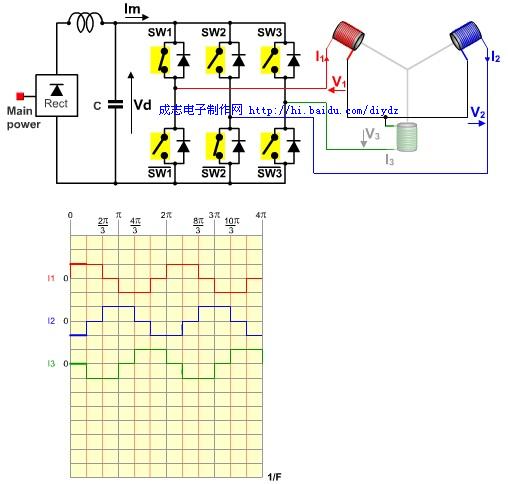
如图所示