 式中:
L——螺杆(或螺母)的位移;
Ph——导程;
φ ——螺杆和螺母间的相对转角。
一、滑动螺旋传动的特点
1. 降速传动比大
2. 具有增力作用
3. 能自锁
4. 效率低、磨损快
二、滑动螺旋传动的形式及应用
1. 螺母固定,螺杆转动并移动
如图1(a)所示,这种传动型式的螺母本身就起着支承作用,从而简化了结构,消除了螺杆与轴承之间可能产生的轴向窜动,容易获得较高的传动精度。缺点是所占轴向尺寸较大(螺杆行程的两倍加上螺母高度),刚性较差。因此该形式仅适用于行程短的情况。
2.螺杆转动,螺母移动
如图1(b)所示,这种传动形式的特点是结构紧凑(所占轴向尺寸取决于螺母高度及行程大小),刚度较大,因此适用于工作行程较长的情况。
式中:
L——螺杆(或螺母)的位移;
Ph——导程;
φ ——螺杆和螺母间的相对转角。
一、滑动螺旋传动的特点
1. 降速传动比大
2. 具有增力作用
3. 能自锁
4. 效率低、磨损快
二、滑动螺旋传动的形式及应用
1. 螺母固定,螺杆转动并移动
如图1(a)所示,这种传动型式的螺母本身就起着支承作用,从而简化了结构,消除了螺杆与轴承之间可能产生的轴向窜动,容易获得较高的传动精度。缺点是所占轴向尺寸较大(螺杆行程的两倍加上螺母高度),刚性较差。因此该形式仅适用于行程短的情况。
2.螺杆转动,螺母移动
如图1(b)所示,这种传动形式的特点是结构紧凑(所占轴向尺寸取决于螺母高度及行程大小),刚度较大,因此适用于工作行程较长的情况。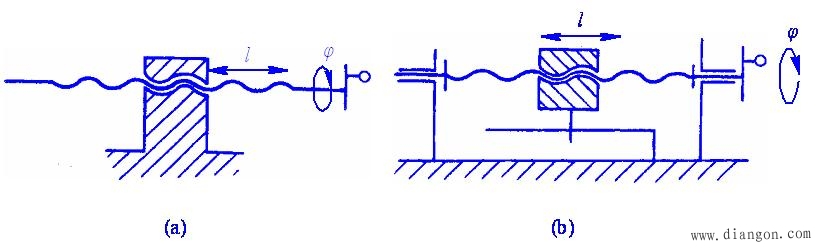 图1 滑动螺旋传动的基本型式
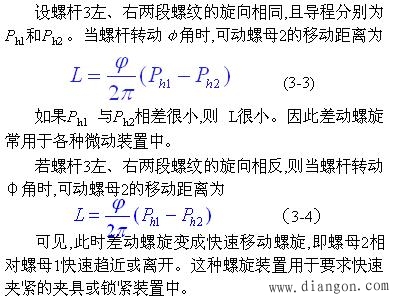
图1 滑动螺旋传动的基本型式除上述两种基本传动形式外,还有一种螺旋传动——差动螺旋传动,其原理如图2所示。
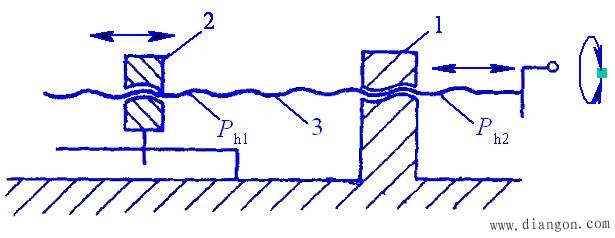
图2 差动螺旋传动原理
三、螺旋副零件与滑板连接结构的确定 1. 刚性连接结构 图3所示为刚性连接结构,这种连接结构的特点是牢固可靠。
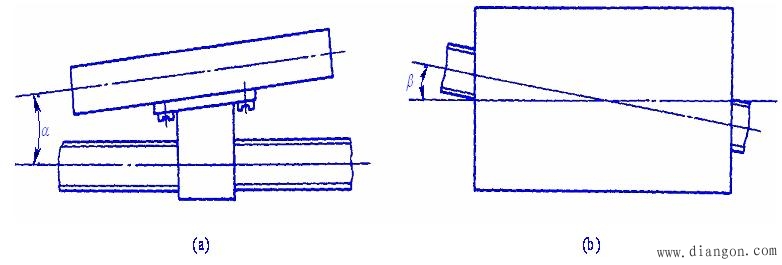
图3 刚性连接结构 2. 弹性连接结构 图4所示的装置中,螺旋传动采用了弹性连接结构。
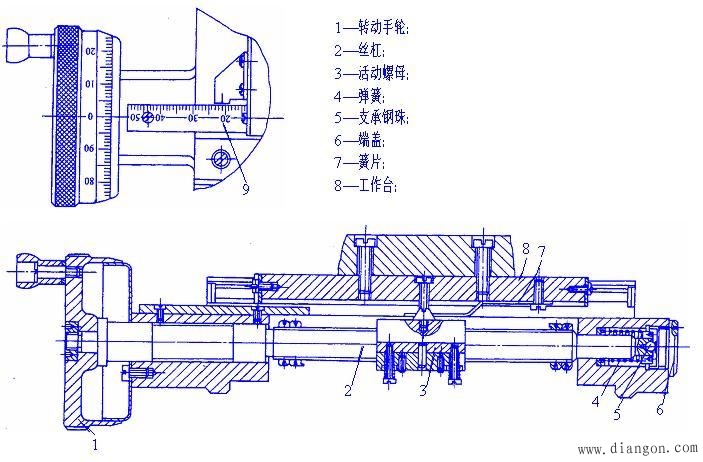
图4 测量显微镜纵向测微螺旋 3.活动连接结构 图5所示为活动连接结构的原理图。
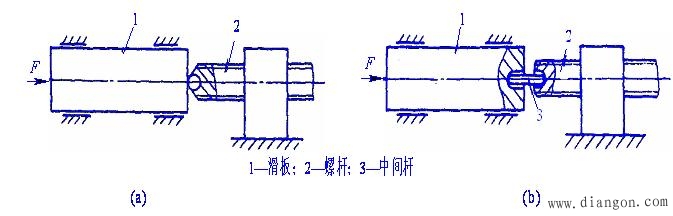 图5 活动连接结构
四、影响螺旋传动精度的因素及提高传动精度的措施
1.螺纹参数误差
(1)螺距误差。
(2)中径误差。
(3)牙型半角误差。螺纹实际牙型半角与理论牙型半角之差称为牙型半角误差(如图6 所示)
图5 活动连接结构
四、影响螺旋传动精度的因素及提高传动精度的措施
1.螺纹参数误差
(1)螺距误差。
(2)中径误差。
(3)牙型半角误差。螺纹实际牙型半角与理论牙型半角之差称为牙型半角误差(如图6 所示)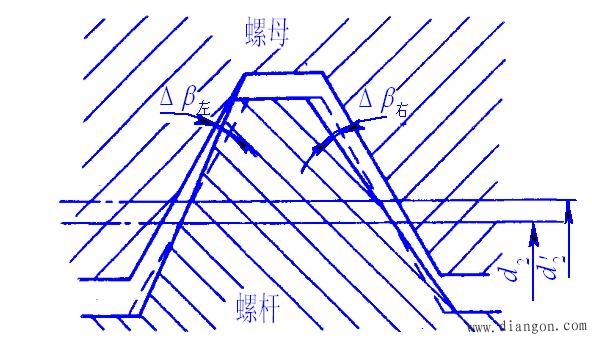
图6 牙型半角误差
2.螺杆轴向窜动误差 如图7所示,若螺杆轴肩的端面与轴承的止推面不垂直于螺杆轴线而有α1和α2的偏差,则当螺杆转动时,将引起螺杆的轴向窜动误差,并转化为螺母位移误差。螺杆的轴向窜动误差是周期性变化的,以螺杆转动一周为一个循环。最大的轴向窜动误差为 Δmax =Dtanαmin (3-5) 式中: ; D——螺杆轴肩的直径; αmin——α1和α2中较小者,对于图3-14,αmin为α2。
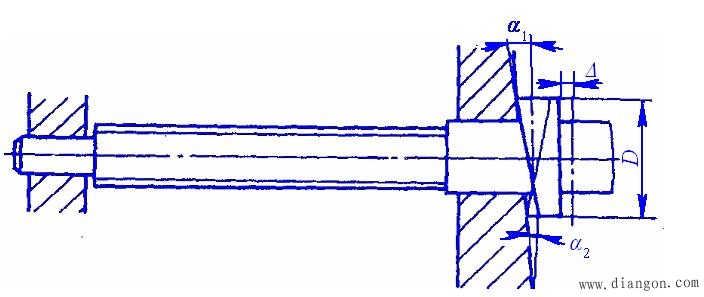
图7 螺杆轴向窜动误差 3. 偏斜误差 在螺旋传动机构中,如果螺杆的轴线方向与移动件的运动方向不平行而有一个偏斜角ψ(见图8)时,就会发生偏斜误差。设螺杆的总移动量为L,移动件的实际移动量为x,则偏斜误差为 ΔL=L-x=L(1-cosψ)=2Lsin2 由于ψ一般很小,因此sin (ψ/2)≈ψ/2,则
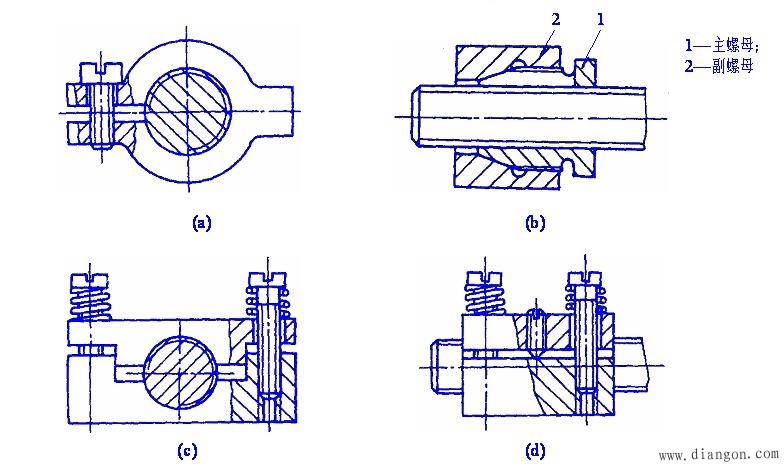
图8 偏斜误差
4. 温度误差 当螺旋传动的工作温度与制造温度不同时,将使螺杆长度和螺距发生变化,从而产生传动误差,这种误差称为温度误差,其大小为 ΔLt=LωaΔt (3-7) 式中: Lω——螺杆螺纹部分的长度; a——螺杆材料的热膨胀系数,对于钢,一般取为11.6×10-6/℃。 Δt——工作温度与制造温度之差。
五、消除螺旋传动的空回的方法 1. 利用单向作用力 同时,这种结构在螺母上无需开槽或剖分(见图9),因此螺杆与螺母接触情况较好,有利于提高螺旋副的寿命。
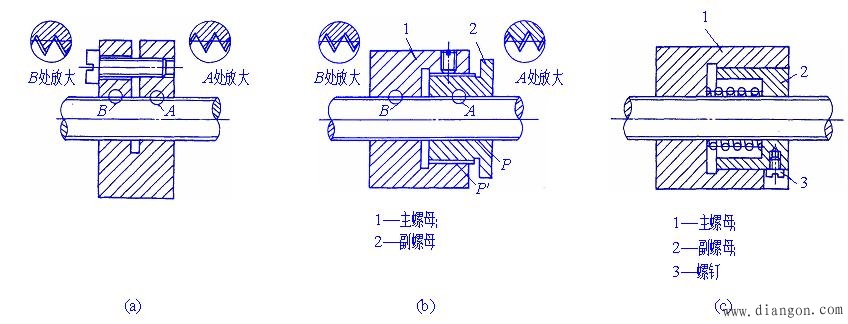 图9 螺纹间隙径向调整结构
图9 螺纹间隙径向调整结构2. 利用调整螺母 (1) 径向调整法 图9所示为径向调整法的典型示例。图9(a)采用开槽螺母结构,拧动螺钉可以调整螺纹间隙。图9(b)采用卡簧式螺母结构。图9(c)采用对开螺母结构。为了便于调整,螺钉和螺母之间装有螺旋弹簧,这样可使压紧力均匀稳定。为了避免螺母直接压紧在螺杆上而增加摩擦力矩,加速螺纹磨损,可在此结构中装入紧定螺钉以调整其螺纹间隙,如图9(d)所示。 (2) 轴向调整法。 图10为轴向调整法的典型结构示例。图10(a)为开槽螺母结构, 拧紧螺钉强迫螺母变形,使其左、右两半部的螺纹分别压紧在螺杆螺纹相反的侧面上, 从而消除了螺杆相对螺母轴向窜动的间隙。图1(b)为刚性双螺母结构,主螺母1和副螺母2之间用螺纹连接。
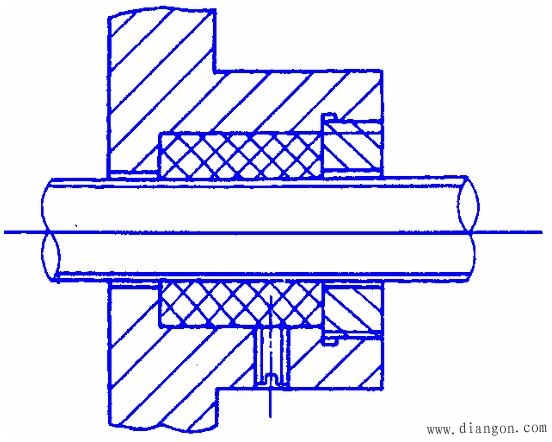 图10 螺纹间隙轴向调整结构
3.利用塑料螺母
是用聚乙烯或聚酰胺(尼龙)制作的螺母结构,用金属压圈压紧,利用塑料的弹性可很好地消除螺旋副的间隙。
图10 螺纹间隙轴向调整结构
3.利用塑料螺母
是用聚乙烯或聚酰胺(尼龙)制作的螺母结构,用金属压圈压紧,利用塑料的弹性可很好地消除螺旋副的间隙。