通过学习知道,基本RS触发器的触发方式是电平触发方式,即只要输入端R、S的电平状态发生变化,触发器的状态就跟着发生相应的变化。但是,在实际应用中,触发器的工作状态不仅要由R、S端的信号来决定,而且还希望触发器按一定的节拍翻转。为此,给触发器加一个控制信号,使触发器只有在控制信号到达时才按输入信号改变状态。控制触发器动作的信号为脉冲信号,因此也叫时钟脉冲或时钟信号,用CP(Clock PulSe)表示。
具有时钟脉冲控制的触发器状态的改变与时钟脉冲同步,所以称为同步触发器。实现时钟控制的最简单的触发器是同步RS触发器。
下面以同步RS触发器为例,介绍同步触发器的电路结构及动作特点。
1、电路结构与工作原理
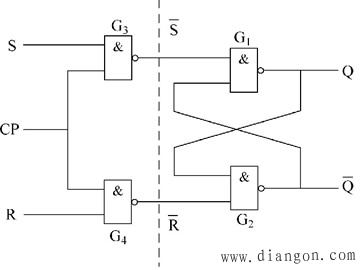
图1(a)所示为同步RS触发器的电路结构,图1(b)所示为同步RS触发器的逻辑图形符号。
 |
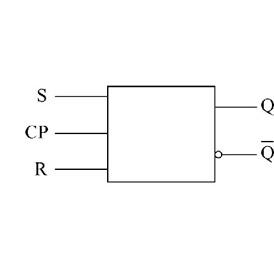 |
| 1(a) 电路图 | 1(b) 逻辑符号 |
从图1(a)中可以看出,同步RS触发器的电路由两部分组成:一部分是由与非门G1和 G2组成的基本RS触发器;另一部分是由与非门G3和G4组成的控制电路。
因此,同步RS触发器是在基本RS触发器的基础上进一步扩展而成的。
根据图1(a),可以写出同步RS触发器的输出与输入之间的逻辑表达式为
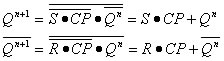 |
(1) |
由式(1)可以看出,当CP=0时,不论输入端R、S的状态如何变化,触发器均保持原态不变;当CP=1时,式1相同,即此时实际上是一个基本RS触发器。
根据式(1)可以列出同步RS触发器的特性表,如表1所示。
| 表1 同步RS触发器的特性表 |
| CP | S | R | Qn | Qn+1 | 功能说明 |
| 0 | × | × | 0 | 0 | 保持原态 |
| 0 | × | × | 1 | 1 | |
| 1 | 0 | 0 | 0 | 0 | 保持原态 |
| 1 | 0 | 0 | 1 | 1 | |
| 1 | 0 | 1 | 0 | 0 | 输入状态与S相同 |
| 1 | 0 | 1 | 1 | 0 | |
| 1 | 1 | 0 | 0 | 1 | 输入状态与S相同 |
| 1 | 1 | 0 | 1 | 1 | |
| 1 | 1 | 1 | 0 | × | 状态不定 |
| 1 | 1 | 1 | 1 | × |
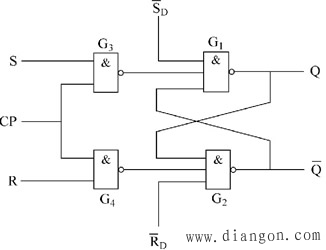
在使用同步RS触发器的过程中,经常需要在时钟信号来临之前将触发器预先设置成指定的状态。因此在实用的同步RS触发器电路中,往往还设有置位输入端和复位输入端。因为置位、复位操作不与时钟脉冲同步,因此又称为异步置位输入端和异步复位输入端,如图2所示。
 |
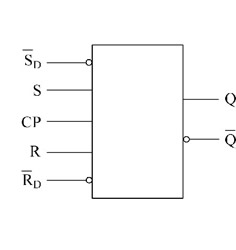 |
| 2(a) 电路图 | 2(b) 逻辑符号 |
由图2可以看出,异步置位输入端![]() 和异步复位输入端
和异步复位输入端![]() 分别加在输出门G1和G2上,只要在
分别加在输出门G1和G2上,只要在![]() 和
和![]() 加上低电平,立即将触发器置1或置0,而不受时钟脉冲的控制,即与时钟脉冲异步。触发器正常工作时,
加上低电平,立即将触发器置1或置0,而不受时钟脉冲的控制,即与时钟脉冲异步。触发器正常工作时,![]() 和
和![]() 要处于高电平,只有在触发器需要清零或置1时才将
要处于高电平,只有在触发器需要清零或置1时才将![]() 和
和![]() 处于低电平。
处于低电平。
2、动作特点
由图1和2可以看出,在CP=0期间,同步RS触发器保持原来的状态,不受输入信号R和S的影响(![]() =
=![]() =1)。在CP=1期间,S和R的信号全部通过G3和G4门传到基本RS触发器的输入端,即在CP=1的全部时间里,输入端R和S的信号都能引出触发器输出端的变化。
=1)。在CP=1期间,S和R的信号全部通过G3和G4门传到基本RS触发器的输入端,即在CP=1的全部时间里,输入端R和S的信号都能引出触发器输出端的变化。
在一个时钟脉冲周期中触发器发生多次翻转的现象叫做空翻。空翻是一种有害的现象,它使得时序电路不能按时钟节拍工作,造成系统的误动作,如图3所示。
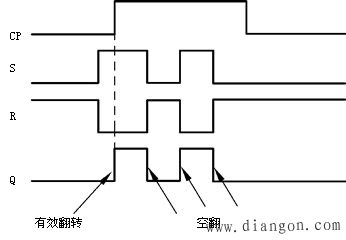 |
| 图3 空翻现象 |